-
试题检索 :
-
教材版本 :
-
课本 :
-
题型 :
-
难易度 :
如图,抛物线y =ax2+bx+c过点A(-1,0),且经过直线y =x-3与x轴 的交点B及与y轴的交点C.
的交点B及与y轴的交点C.

【小题1】(1)求点B、C的坐标;
【小题2】(2)求抛物线的解析式;
【小题3】(3)求抛物线的顶点M的坐标;
【小题4】(4)在直线y =x-3上是否存在点P,使△CMP是等腰三角形?若存在,求出满足条件的P点坐标;若不存在,说明理由.
如图,已知网格上最小的正方形的边长为1,
【小题1】(1)分别写出A、B、C三点的坐标。
【小题2】(2)作△ABC关于Y轴对称的图形△A′B′C′(不写作法)并回答关于Y轴对称的两个点之间有生命关系?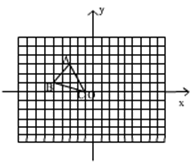
让我们一起来探索平面直角坐标系中平行四边形的顶点的坐标之间的关系。
第一步:数轴上两点连线的中点表示的数
自己画一个数轴,如果点A、B分别表示-2、4,则线段AB的中点M表示的数是 。 再试几个,我们发现:
数轴上连结两点的线段的中点所表示的数是这两点所表示数的平均数。
第二步;平面直角坐标系中两点连线的中点的坐标(如图①)
为便于探索,我们在第一象限内取两点A(x1,y1),B(x2,y2),取线段AB的中点M,分别作A、B到x轴的垂线段AE、BF,取EF的中点N,则MN是梯形AEFB的中位线,故MN⊥x轴,利用第一步的结论及梯形中位线的性质,我们可以得到点M的坐标是( , )(用x1,y1,x2,y2表示),AEFB是矩形时也可以。我们的结论是:平面直角坐标系中连结两点的线段的中点的横(纵)坐标等于这两点的横(纵)坐标的平均数。

图① 图②
第三步:平面直角坐标系中平行四边形的顶点坐标之间的关系(如图②)
在平面直角坐标系中画一个平行四边形ABCD,设A(x1,y1),B(x2,y2),C(x3,y3),
D(x4,y4),则其对角线交点Q的坐标可以表示为Q( , ),也可以表示为Q( , ),经过比较,我们可以分别得出关于x1,x2,x3,x4及,y1,y2,y3,y4的两个等式是 和 。 我们的结论是:平面直角坐标系中平行四边形的对角顶点的横(纵)坐标的 。
根据指令[s,A](s≥0,0°<A≤360°),机器人在平面上完成下列动作:先原地逆时针旋转角度A,再朝其面对的方向行走s个单位.现机器人在平面直角坐标系的原点,且面对x轴的正方向,如果输入指令为[1,45°],那么连续执行三次这样的指令,机器人所在位置的坐标是( )
在平面直角坐标系中,点 一定在( )。
一定在( )。
如图,Rt△ABC中,∠C=90°,AC=BC,AB=4,试建立适当的直角
坐标系,并写出各顶点的坐标.

 在平面直角坐标系中的位置如图10所示.
在平面直角坐标系中的位置如图10所示. 的坐标;
的坐标; 按顺时针方向旋转
按顺时针方向旋转 ;
; 旋转到点
旋转到点 所经过的路线长(结果保留
所经过的路线长(结果保留 ).
).
 ;
; 所经过的路线长(结果保留
所经过的路线长(结果保留
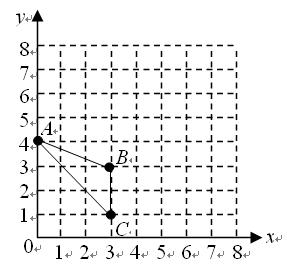
 )、B(3,
)、B(3, )、C(2,1).
)、C(2,1). 
 ;
; 、
、 的坐标(其中
的坐标(其中 轴交于A(1,0),B(
轴交于A(1,0),B( ,0)两点,与
,0)两点,与 轴交于点C(0,3).
轴交于点C(0,3).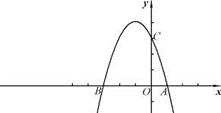
 )
) ,
, )
) )
)